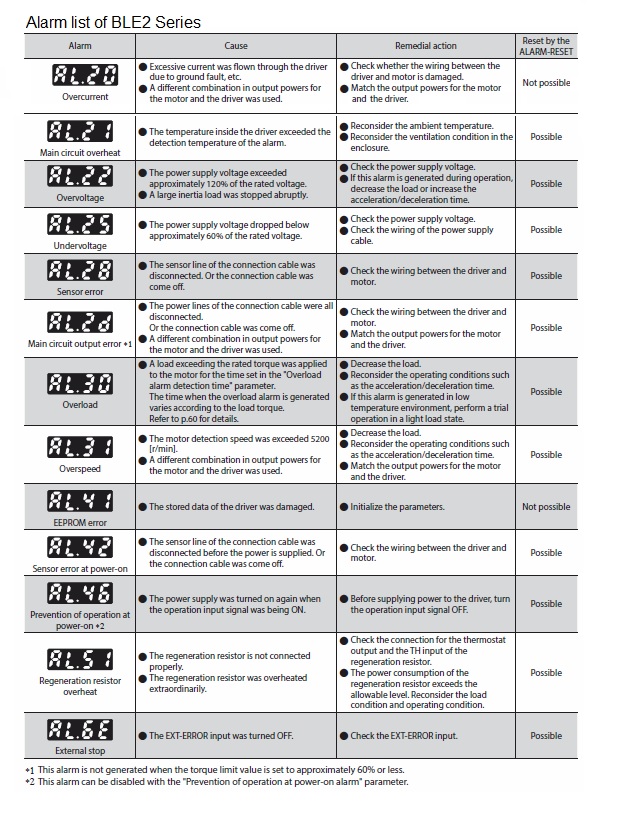
Ich verwende die BLE2-Serie und sehe auf der Frontplatte des Treibers die Meldung "AL30". Was bedeutet AL30?
"AL30" ist ein Alarm, der einen Überlast-Zustand anzeigt.
Die Ursache kann sein, dass der Motor länger als die im Parameter 'Overload alarm detection time' eingestellte Zeit mit einer Last belastet wurde, die den Dauerbetrieb überschreitet.
Prüfen Sie die Betriebsbedingungen wie Laststatus, Beschleunigungs-/Abbremszeit usw.
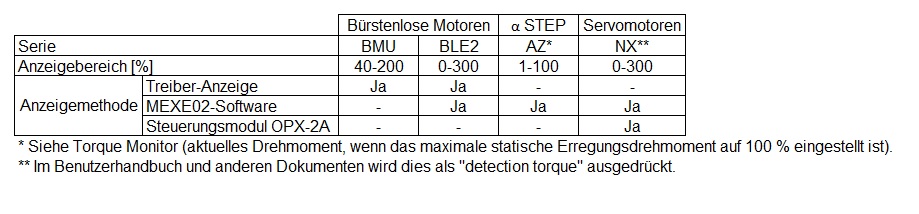
Gibt es eine Möglichkeit, das erzeugte Drehmoment (Lastdrehmoment) zu überprüfen?
Es kann durch den Lastfaktor überprüft werden.
Der Lastfaktor ist das Verhältnis des erzeugten Drehmoments (Lastdrehmoment) zum Nenndrehmoment des Motors von 100%.
Die Art der Überprüfung hängt vom Produkt ab, siehe unten.
Kann die Beschleunigung/Abbremsung bei der BMU-Serie eingestellt werden?
Beschleunigung und Abbremsen können auf folgende Arten eingestellt werden.
1) Analoge Einstellung (Standardeinstellung)
Entfernen Sie die vordere Abdeckung und stellen Sie die Beschleunigungs-/Abbremszeit mit dem Beschleunigungs-/Abbremszeit-Potentiometer ein.
Der Einstellbereich beträgt 0,1 - 15,0 s.
2) Digitale Einstellung*
Einstellung über Betriebsdaten.
Der Einstellbereich beträgt 0,0 bis 15,0 s. Die Einstellung kann für jede Betriebsdaten-Nr. vorgenommen werden, und die Beschleunigungs-/Abbremszeit kann entsprechend eingestellt werden.
* Bei digitalen Einstellungen muss der Parameter 'Analog acceleration/deceleration' vorher auf 'Digital' eingestellt werden.

Abbildung 1

Abbildung 2
Ich habe bei der BMU-Serie die Einstellung der Drehzahl von 1000 U/min auf 2000 U/min geändert, aber wenn ich den Strom wieder einschalte und die Maschine laufen lasse, kehrt sie auf 1000 U/min zurück. Woran liegt das?
Um die geänderte Drehzahl zu bestätigen, muss das Einstellrad nach dem Ändern der Drehzahl gedrückt werden.
Wenn die Drehzahlanzeige blinkt, ist die Drehzahl noch nicht endgültig eingestellt. Drücken Sie dann das Einstellrad am Ende, um die Drehzahl endgültig einzustellen.
Die Anweisungen zur Einstellung lauten wie folgt:
1) Drehen Sie das Einstellrad, um die gewünschte Drehzahl einzustellen (Abb. 1).
2) Drücken Sie das Einstellrad, um die Drehzahl zu bestimmen (Abb. 2).

Abbildung 1

Abbildung 2
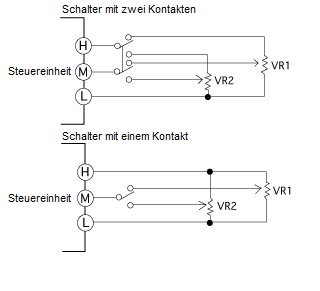
Ich verwende die BLE2 Serie. Ich möchte zwei externe Geräte zur Einstellung der Drehzahl verwenden, um die Drehzahl in zwei Schritten zu ändern, anstatt das interne Gerät zur Drehzahleinstellung zu verwenden. Ist dies möglich? Bitte sagen Sie mir auch, wi
Dies ist möglich. Die Verdrahtung ist wie folgt.
Verwenden Sie eine Version mit Kontakten mit geringer Kapazität, die 6 VDC 1 mA öffnen und schließen können.
Wenn ein Schalter oder ähnliches mit neutralen Kontakten verwendet wird, sind die Kontakte offen und der Motor kann eine abbremsende Bewegung verursachen.
Ich möchte einen Induktionsmotor vorwärts und rückwärts laufen lassen. Wie soll ich ihn verdrahten?
Induktionsmotoren sind in Versionen mit dreiphasigem und einphasigem Stromeingang erhältlich. Die Art der Verdrahtung hängt von der Spannung der Stromversorgung ab.
Dreiphasige Motoren
Dreiphasige Induktionsmotoren drehen sich in die entgegengesetzte Richtung, wenn die beiden Kabel R, S oder T in Abb. 1 vertauscht werden. Eine sofortige Umdrehung in Vorwärts- und Rückwärtsrichtung belastet das Getriebe stark, was zu Ausfällen und einer verkürzten Lebensdauer führt. Die Umschaltung der Drehrichtung sollte nach dem Stopp des Motors erfolgen.
Einphasige Motoren
Einphasige Induktionsmotoren gibt es mit drei oder vier Zuleitungen. Bei Motoren mit drei Zuleitungen kann die Umdrehung in die entgegengesetzte Richtung einfach durch Vertauschen der weißen und roten Kabel auf der L-Seite erfolgen, wie in Abb. 2 dargestellt. Bei einem Induktionsmotor mit vier Zuleitungen kann die Drehrichtung durch Vertauschen der schwarzen und weißen Kabel umgekehrt werden. Führen Sie dazu die Verdrahtung wie in Abb. 3 gezeigt aus. Einphasige Induktionsmotoren mit hoher Trägheitslast schalten die Drehrichtung nicht um, wenn sie kurzzeitig vorwärts oder rückwärts drehen. Schalten Sie die Drehrichtung um, nachdem der Motor gestoppt wurde. Wenn während der Umdrehung ein sofortiger Vorwärts-/Rückwärtsbetrieb erforderlich ist, verwenden Sie einen Induktionswendemotor.
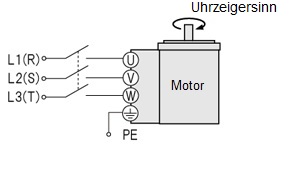
Abbildung 1
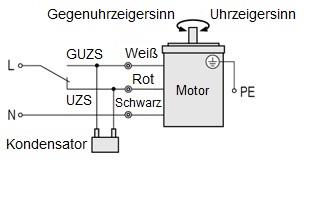
Abbildung 2
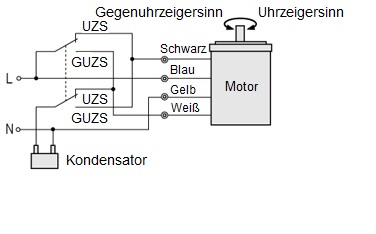
Abbildung 3
Was ist der Unterschied zwischen dem READY-Ausgang der AZ-Serie und dem PLS-RDY-Ausgang?
Der Ausgang READY wird ausgegeben, wenn der Treiber für den Betrieb bereit ist.
Der Ausgang PLS-RDY wird ausgegeben, wenn der Treiber für den Betrieb mit Takteingang bereit ist.
Die Ausgänge SYS-RDY und DCMD-RDY sind ebenfalls verfügbar.
SYS-RDY-Ausgang
Der Ausgang SYS-RDY wird ausgegeben, wenn der Zustand des Ausgangssignals nach dem Einschalten der Stromversorgung festgestellt wird und der Signaleingang wirksam wird.
DCMD-RDY-Ausgang
Dieser Ausgang wird ausgegeben, wenn die Vorbereitung für 'Direct Data Operation' (Direktdatenbetrieb) fertig ist.
Mehrere netzwerkfähige Produkte sind an denselben Master angeschlossen. Wenn die MEXE02-Software an die erste Einheit angeschlossen ist, sind dann Dateneinstellung, Teaching und Remote-Betrieb auch an anderen Einheiten möglich?
Dies ist nicht möglich. Mit der MEXE02-Software kann nur eine Einheit pro Datei für Dateneinstellung und Teaching/Remote-Betrieb verwendet werden.
Kann die AZ-Serie mit Takteingang mit FREE-Eingang (Motor nicht erregt, elektromagnetische Bremse freigegeben) verwendet werden?
Dies ist möglich. Der FREE-Eingang arbeitet auch dann, wenn sich der C-ON-Eingang im ON-Zustand befindet (Erregungszustand des Motors ON).
Wenn ich den Motor als beweglichen Teil verwende, ist es dann sicher, das Anschlusskabel im Kabelhalter zu verwenden?
Der Widerstandsfähigkeit von normalen Anschlusskabeln und flexiblen Anschlusskabeln ist sehr unterschiedlich. Wenn ein normales Anschlusskabel im Kabelhalter verwendet wird, besteht die Gefahr, dass das Kabel bricht. Verwenden Sie flexible Anschlusskabel, wenn sie in beweglichen Teilen eingesetzt werden.
Gibt es bei der DR-Serie, DRS2-Serie oder DRLII-Serie ein Problem einen Vorwärts-/Rückwärtsbetrieb über 2-3 mm auszuführen?
Ein Vorwärts-/Rückwärtsbetrieb über 2-3 mm stellt an sich kein Problem dar.
Bei sehr kurzen Verfahrwegen kann es jedoch sein, dass sich das Schmierfett nicht richtig verteilt und das Schmierfett nur in dem Teil blank ist, der benutzt wird. Da unzureichendes Schmierfett zu Ausfällen führen kann, stellen Sie bitte sicher, dass sich das Schmierfett verteilt, indem Sie die Maschine z. B. einmal am Tag mit vollem Hub laufen lassen.
Können elektrische Zylinder im Push-Motion-Betrieb wie pneumatische Zylinder arbeiten?
Ein Push-Motion-Betrieb ist mit der EAC-Serie möglich.
Da der Zylinder mit einem Schrittmotor ausgestattet ist, kann die Kraft, mit der die Last geschoben wird (Push-Motion), durch Änderung des Stromwerts zum Motor variiert werden.
Was ist der Unterschied zwischen Transportlast und Schubkraft?
Die Transportlast ist die Lastmasse, die gemäß den Spezifikationen des Aktuators bewegt werden kann. Es wird jeweils ein Wert für die horizontale bzw. vertikale Bewegungsrichtung angegeben.
Die Schubkraft ist die Kraft, mit der der Aktuator die Last vorantreiben kann. Sie ist die Kraft, die auf die bewegte Last wirkt.
Ist es bei elektrischen Linearführungen möglich, den Sensor auf der den Abmessungen des Katalogs entgegengesetzten Seite zu montieren?
Dies ist möglich. Schauen Sie für die Installation bitte in der Bedienungsanleitung des jeweiligen Produkts nach.
Kann man bei elektrischen Linearführungen die Abgangsrichtung des Motorkabels ändern?
Ja, die Kabelabgangsrichtung kann geändert werden. Beachten Sie jedoch, dass dies von der entsprechenden Serie und Ausführung abhängt. Die Details dazu entnehmen Sie bitte der Bedienungsanleitung des jeweiligen Produkts. Bei einigen Serien kann die Richtung nicht geändert werden.
Ich möchte eine elektrische Linearführung für eine Positionierung von 300 mm in 1 Sekunde verwenden. Kann ich ein Produkt mit einer maximalen Geschwindigkeit von 300 mm/s auswählen? Was ist bei der Beschleunigungs-/Abbremszeit zu beachten?
Wenn Sie die maximale Geschwindigkeit so wählen, wie sie ist, dauert es tatsächlich länger. Die spezifizierte maximale Geschwindigkeit stellt die momentane Höchstgeschwindigkeit der Linearführung dar und berücksichtigt nicht die Beschleunigungs-/Bremszeit. Das bedeutet, dass es tatsächlich mehr Zeit braucht.
Obwohl die genaue Taktzeit rechnerisch ermittelt werden kann, gibt es für jede elektrische Linearführungen das Diagramm 'Positionierentfernung - Positionierzeit', aus dem die Taktzeit entnommen werden kann.
Was ist der Unterschied zwischen den beiden im Katalog angegebenen Einheiten für die Drehzahl, [Hz] und [U/min]?
[U/min] steht für die Anzahl der Umdrehungen pro Minute. Diese Einheit wird gewöhnlich verwendet, um die Drehzahl eines Motors auszudrücken.
[Hz] steht für die Anzahl der Takte pro Sekunde. Dies ist die Einheit für die Geschwindigkeit des Taktsignals, das vom Controller an den Motor (Treiber) übertragen wird. Die Taktfrequenz (Hz) ist proportional zur Drehzahl.
Die Umrechnungsformel für [U/min] und [Hz] lautet wie folgt:
Drehzahl [U/min] = f × (θs/360) × 60
f : Taktfrequenz [Hz]
θs : Winkel der Bewegung pro Takt des Motors [˚]
Bei der automatischen Sequenzierung der AZ-Serie wurde der BREAK-ATSQ-Eingang auf manuelle Sequenzierung geschaltet. Wie viel Zeit muss sich dann vor dem SSTART-Eingang genommen werden?
Wenn der Eingang BREAK-ATSQ auf ON geschaltet ist und der automatische progressive Betrieb auf manuellen progressiven Betrieb umgestellt wird:
(1) Der Motor steht still, wenn die aktuell in Betrieb befindlichen Betriebsdaten beendet sind.
Der Motorstillstand kann bestätigt werden, indem der Ausgang READY auf ON geschaltet wird.
(2) Sobald der READY-Ausgang auf ON geschaltet ist, schalten Sie den SSTART-Eingang am Timing-Ausgang für mindestens 2 msec nach dem gleichzeitigen Eingang (0 sec oder mehr) auf ON. 2 msec für den SSTART-Eingang ist die für die interne Verarbeitung erforderliche Zeit.
Kann der HOME PRESET-Schalter auf der Oberfläche des Treibers der AZ-Serie außer Kraft gesetzt werden?
Dies ist möglich.
Die Zuordnung der Signale kann im Parameter 'Extended input (EXT-IN)' im Parameter 'EXT-IN & VIR-IN & USR-OUT function (Extend)' geändert werden.
Die Grundeinstellung ist 'P-PRESET', aber wenn diese auf 'No function' geändert wird, ist der HOME PRESET-Schalter auf der Vorderseite des Treibers außer Kraft gesetzt.
Hinweis: Wenn diesem Parameter ein anderes Signal als 'P-PRESET' zugewiesen wird, kann der HOME PRESET-Schalter auf eine andere Funktion umgestellt werden.
Gibt es bei der AZ-Serie eine Grenze für die Anzahl der P-PRESETs?
Es gibt eine Grenze für die Anzahl der Zyklen. Wenn P-PRESET ausgeführt wird, wird es in den internen nichtflüchtigen Speicher des Treibers geschrieben, so dass die Anzahl der beschreibbaren Zyklen etwa 100.000 beträgt.
Was muss ich tun, wenn ich mitten in einem manuellen progressiven Betrieb mit der AZ-Serie zu den Betriebsdaten No. 0 zurückkehren möchte?
Durch Auswahl der Betriebsdaten No. 0 und Einschalten des START-Eingangs kehrt die Maschine zu No. 0 zurück. Der manuelle progressive Betrieb kann auch durch Einschalten des Eingangs SSTART fortgesetzt werden.
Kann die AZ-Serie während der Positionierung auf eine andere Anzahl von Betriebsdaten umschalten, wenn ein Signal anliegt?
Die Ereignissprungfunktion ermöglicht das Umschalten von Betriebsdaten. Die Ereignissprungfunktion ist eine Funktion, die eine Verzweigung des Betriebs entsprechend dem ON/OFF von Signalen bewirkt, die im 'Event trigger I/O' des 'Operation I/O event' eingestellt sind. Wird ein 'Event trigger I/O' während eines verknüpften Betriebs oder Loop-Betriebs erkannt, wird der Betrieb zwangsweise zum Ziel des verknüpften Betriebs umgeschaltet.
Kann bei der AZ-Serie mit integriertem Controller die Steuerung über ein Feldbussystem und der direkte Eingang/Ausgang zusammen verwendet werden?
Ja, dies ist möglich.
Wenn Remote-I/O und Direkt-I/O die gleichen Eingangssignale zugewiesen sind, wird die Funktion ausgeführt, wenn einer der beiden Eingänge vorhanden ist.
Der C-ON-Eingang* und der HMI-Eingang** sind immer ON, wenn sie keinem Eingangsanschluss zugewiesen sind.
Wenn sie sowohl Remote-I/O als auch direktem I/O zugewiesen sind, funktionieren sie nur, wenn beide auf ON geschaltet sind.
*C-ON-Eingang: Wenn der Schalter eingeschaltet ist, befindet sich der Motor im Erregungszustand.
**HMI-Eingang: Wenn er eingeschaltet ist, werden die Funktionsbeschränkungen der MEXE02-Software aufgehoben.
Wird die Information über die Einstellung des 'Software overtravel' bei der AZ-Serie in den Motor oder in den Treiber geschrieben?
Sie wird in den Treiber geschrieben.
Daher müssen beim Austausch des Treibers die Parametereinstellungen erneut vorgenommen werden.
Nicht nur die Inhalte des 'Software overtravel', sondern auch die Dateneinstellungen und Parametereinstellungen der AZ-Serie werden in den Treiber geschrieben. Der einzige Inhalt, der in den Motor geschrieben werden kann, ist die Einstellung der Position durch Rückfahrt zum Referenzpunkt-Betrieb oder P-PRESET-Eingang.
Unter welchen Bedingungen funktioniert bei der AZ-Serie die Steuerung des Treibers im Steuerungsmodus, wenn der Inhalt des Parameters 'Current control mode' in der Parametereinstellung auf 'Servo emulation (SVE)' gesetzt ist?
Wenn zwischen der Soll-Position und der Ist-Position eine Abweichung von 1 Schritt oder mehr auftritt, wird die Stromsteuerung ausgelöst. Dasselbe gilt, wenn der Inhalt von 'Current control mode' auf 'Follow the CCM input' eingestellt ist und der CCM-Eingang eingeschaltet ist.


